Bridging Simulation and Reality in Indoor Aerial Inspection
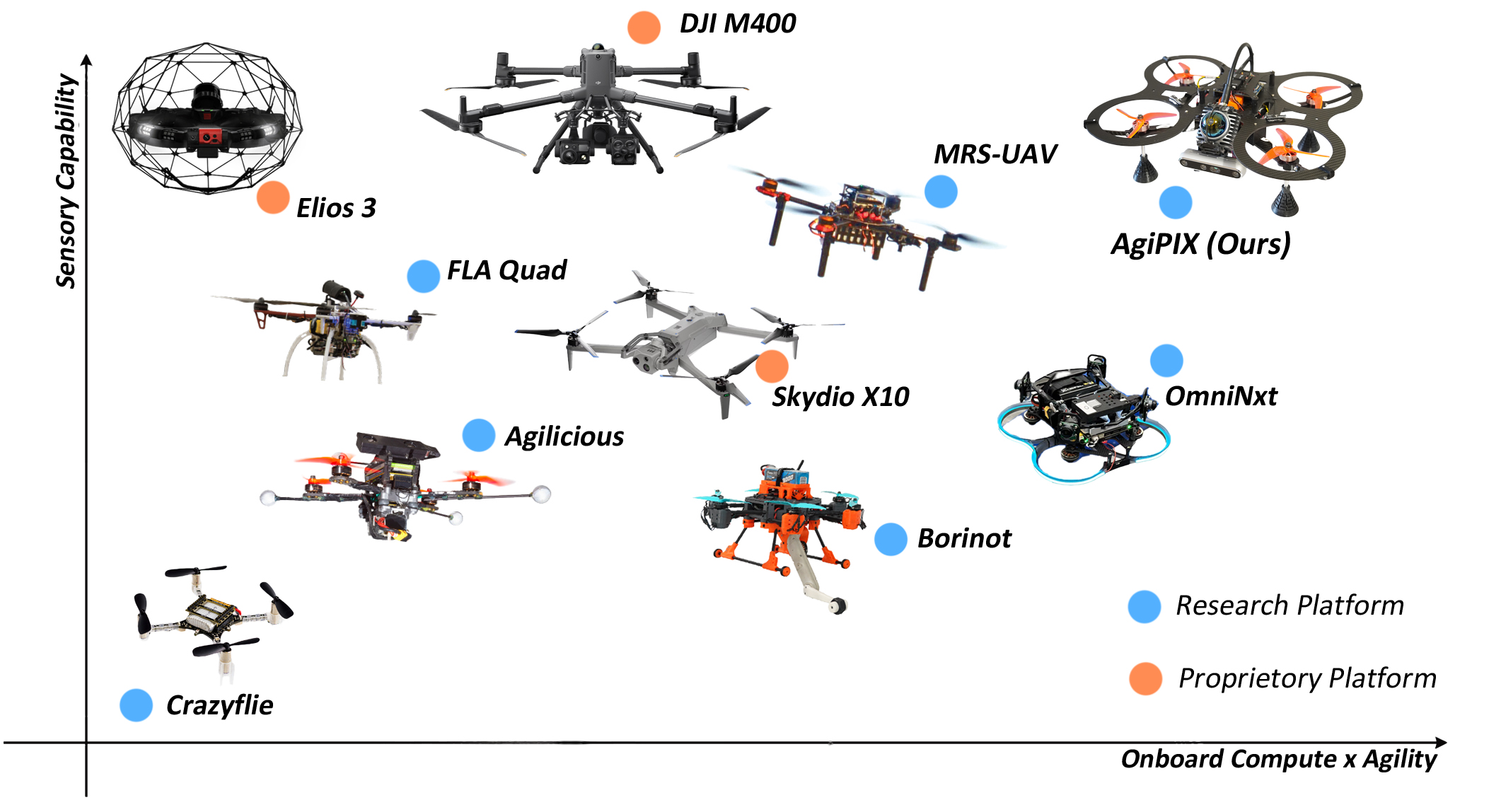
Agipix is an open, compact, actively sensed aerial robotics platform for indoor autonomy and critical-asset inspection. The same ROS 2 containerized autonomy stack runs in Isaac Sim and on real hardware, enabling fast and reproducible sim-to-real transfer.
Simulation

Digital Twin in Isaac Sim with full sensor fidelity and physics simulation
Setup Simulation →
Key Highlights
1. Sim-to-Real Deployability
Identical ROS 2 containers and configs run in Isaac Sim and on hardware; zero code changes between environments.
2. Open-Source Platform
Full BOM, CAD, simulation assets, and the containerized ROS 2 stack are released in this repository.
3. Modular Autonomy Stack
ROS 2–based perception, state estimation, mapping, planning, PX4 interface, and logging run as decoupled nodes.
4. Small Form Factor
Compact 438×372 mm frame with protected sensing and agile indoor operation in narrow industrial spaces.
5. Extensive Sensor Suite
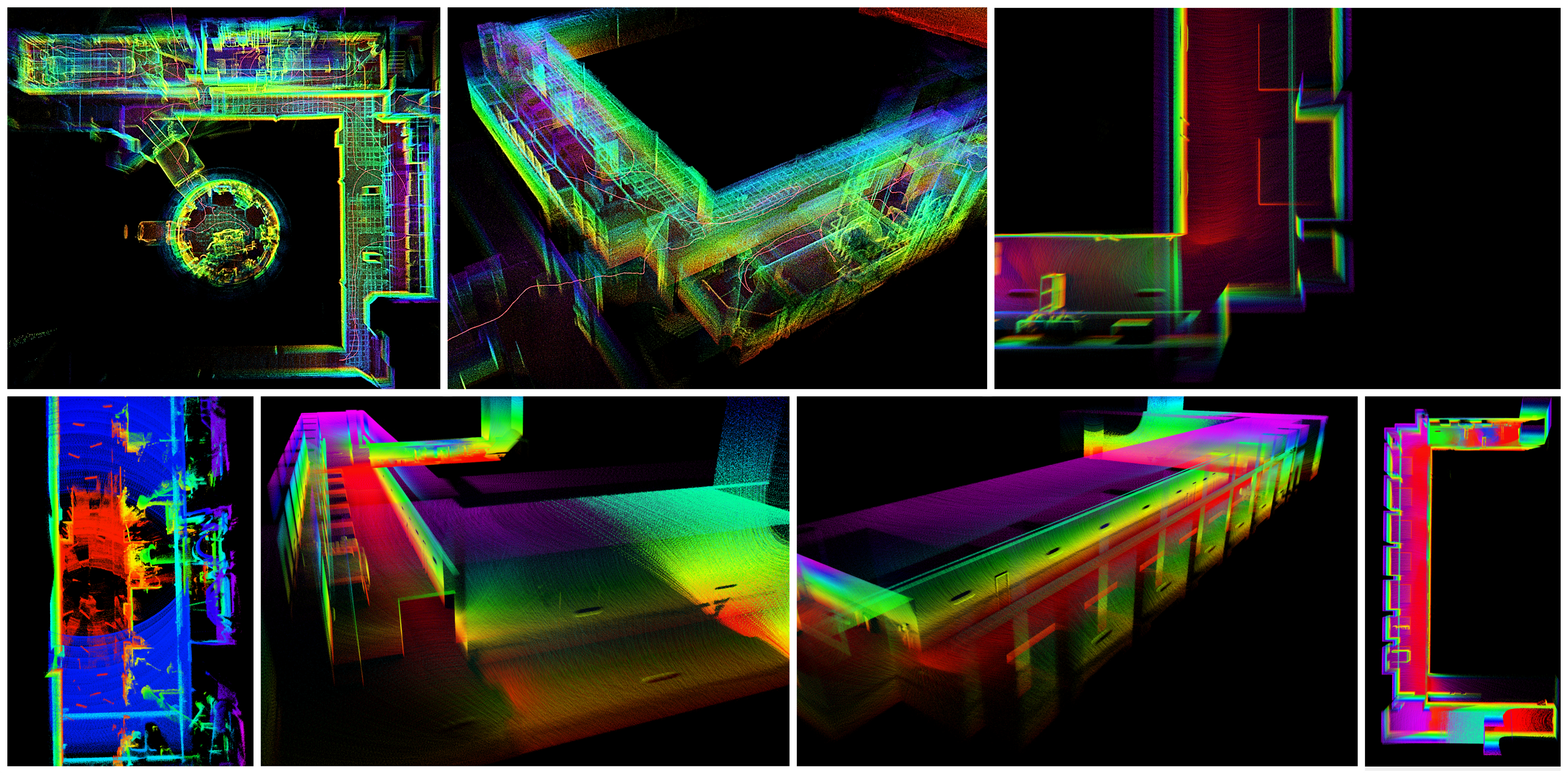
3D LiDAR, RGB camera, and IMU integrated into a LiDAR–inertial–visual stack for robust mapping and exploration.
6. Modular Hardware Design
Layered decks and accessible power/data breakouts simplify sensor or compute upgrades without redesign.

Quick Start
🖥️ Simulation
- Simulation Setup Guide
- Isaac Sim Integration
- ROS 2 Docker Containers
- Digital Twin Environment
🤖 Autonomy
- Navigation & Mapping
- Planning & Control
- Exploration Algorithms
- PX4 Integration
Release Schedule
Public Release
- Documentation: System Overview, Hardware & Sim Setup, Software/Autonomy
Preprint published on Arxiv
ReleasedPaper accepted at ICUAS 2026
ReleasedReal-time OS support with scheduler
ReleasedHardware Syncronisation with ESP32 TimerSync Bridge
ReleasedDocumentation & OS Upgrades
- Documentation: Data-driven Autonomy Setup, UI Setup
- 3D Gaussian Splat for GUI rendering in RVIZ side
- Release of CAD files
- Video and quick start guides
- Preflight checklist and platform manual
Presentation
Official presentation at ICUAS 2026.
ScheduledLong-term Enhancements
- MANET mesh networking integration
- Compliant crash structure update
Collaborate with Us
Interested in joining the AgiPIX project? Fill out the form below to send an email request to the project maintainers with your details.
Cite this work
@misc{arachchige2026agipixbridgingsimulationreality,
title={AgiPIX: Bridging Simulation and Reality in Indoor Aerial Inspection},
author={Sasanka Kuruppu Arachchige and Juan Jose Garcia and Changda Tian and Lauri Suomela and Panos Trahanias and Adriana Tapus and Joni-Kristian Kämäräinen},
year={2026},
eprint={2604.08009},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2604.08009},
}