Agipix Autonomy: Planning and Control
![]()
![]()
![]()
AgiAUTO (ROS 2) — Agipix PX4 Autonomy Stack
This repository is the AgiAUTO autonomy module of Agipix for PX4-based UAV missions in ROS 2.
- HW and SIM Platform Repository: https://github.com/SasaKuruppuarachchi/agipix.git
- Platform docs: https://sasakuruppuarachchi.github.io/agipix/
- Publication (ICUAS 2026 submission): “Agipix: A Comprehensive Aerial Robotics Platform Bridging Simulation and Reality”
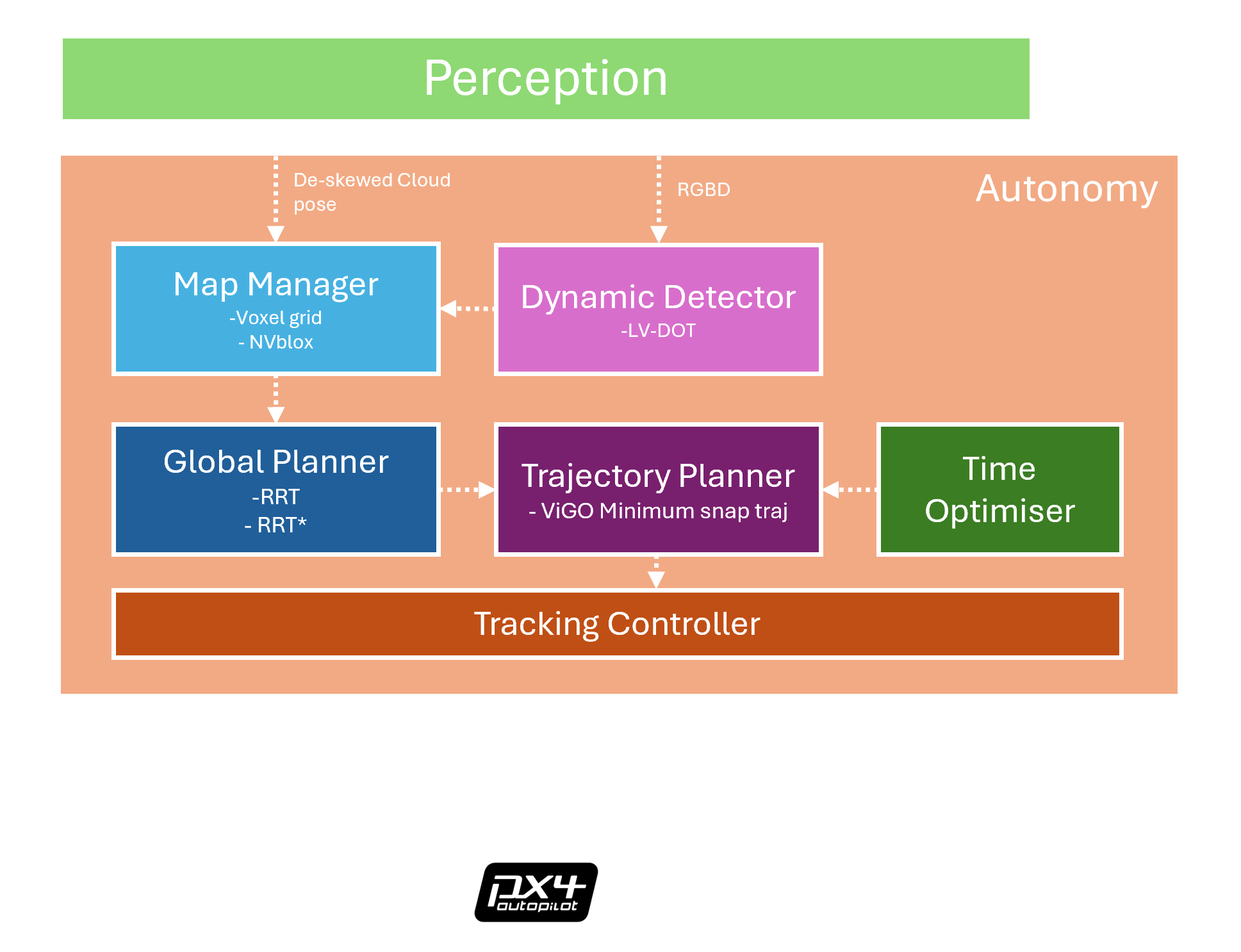
System architecture (current)
Sensors
(depth / point cloud / RGB / lidar)
+ PX4 state topics
│
▼
onboard_detector
(dynamic obstacle detection + tracking)
│
▼
map_manager
(occupancy/dynamic map + collision/raycast)
│
┌───────────────────┴──────────────────────────┐
▼ ▼
global_planner (RRT/RRT*/DEP) trajectory_planner
(global waypoints / exploration path) (poly/PWL/B-spline)
└───────────────────┬──────────────────────────┘
▼
time_optimizer
(optional)
│
▼
autonomous_flight
(mission executive/state machine)
│
▼
px4_control_interface
(DDS tracking mode + setpoint writer + executor flow)
▼
PX4
Package roles
autonomous_flight: mission orchestration (takeoff,navigation,rl_navigation,dynamic_navigation,inspection,dynamic_inspection,dynamic_exploration)px4_control_interface: DDS-native PX4 mode/executor runtime and target tracking bridgemap_manager: occupancy and dynamic map representations, map servicesonboard_detector: dynamic obstacle perception, data association, trackingglobal_planner: global planning and exploration planning (RRT/RRT*, DEP)trajectory_planner: smooth local trajectory generation (poly/PWL/B-spline)time_optimizer: trajectory time allocation optimization utilitiesagi_viz: centralized RViz profiles for autonomy stack visualization
Note: the standalone legacy middle-level controller package is no longer part of the active DDS runtime control path.
Setup
Validated against PX4 v1.16.1 message definitions.
Prerequiste : PX4 ROS 2 interface setup (see PX4 ROS 2 interface)
Build:
cd ~/workspace/agipix_control/src
git clone https://github.com/SasaKuruppuarachchi/agipix_autonomy.git -b dds
git clone https://github.com/SasaKuruppuarachchi/agipix_user_interfaces.git
agidocker
# inside the container
cd /workspaces/agipix_control
colcon build # builds the autonomy stack
source install/setup.bash
Demo media (placeholders)
ros2 launch px4_control_interface dds_shadow.launch.py use_sim_time:=true start_legacy_stack:=true mission:=<mission_name>
Available missions:
takeoff_and_hover, takeoff_and_track_circle, navigation, rl_navigation, dynamic_navigation, dynamic_inspection, dynamic_exploration, inspection
- [PLACEHOLDER] Takeoff + hover demo video
- [PLACEHOLDER] Dynamic navigation demo video
- [PLACEHOLDER] Dynamic exploration demo video
- [PLACEHOLDER] Dynamic inspection demo video
Current status
- ROS 1 → ROS 2 porting completed for the autonomy stack in this repository.
- Runtime stack is PX4 DDS-native (MAVROS backend removed from active control path).
- Mission validation status:
- ✅ takeoff and hover
- ✅ takeoff and track circle
- ✅ navigation
- ✅ rl navigation
- ✅ dynamic navigation
- ✅ dynamic exploration
- ✅ dynamic inspection
Credits
This stack builds on original CERLAB autonomy components and research implementations by Zhefan Xu and collaborators.
This repository version is a ROS 2 integration within Agipix by Sasa Kuruppuarachchi.
Please credit both:
- Original algorithm/software authors (see package-level citations)
- Agipix ROS 2 integration and platform engineering work in this repository