Documentation Hub
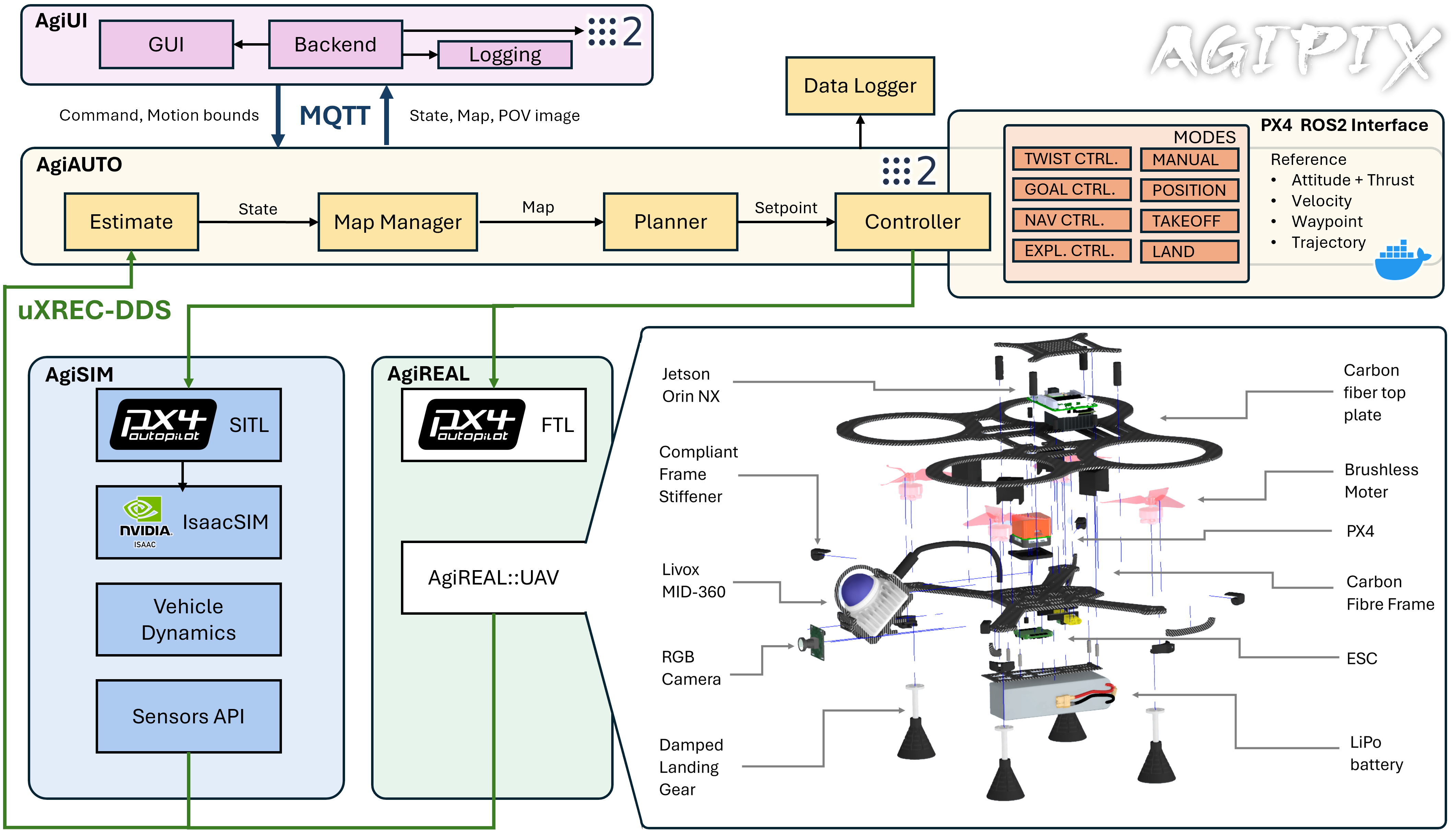
Agipix documentation is organized around the four platform blocks from the paper: real hardware, simulation, autonomy, and operator UI.
Pick a scope to dive into. Each scoped section includes a sidebar with step-by-step pages.
Real Hardware
Build, wire, flash, and validate the physical platform.
- Assembly and wiring
- Flashing Jetson & carrier
- Container and software setup
Simulation
Use the digital twin in Isaac Sim before hardware deployment.
- Isaac Sim environment
- Containerized workflow
- PX4 SITL + ROS 2 bridge
Autonomy
Perception, planning/control, and learning-based navigation.
- Perception pipeline
- Planning and control
- Data-driven policy integration
User Interface
Mission supervision, teleoperation, and human-in-the-loop workflows.
- Teleoperation
- Exploration mode control
- Human-in-the-loop control