Agipix (Autonomy) — Quick Guide
Use this page to navigate the AgiAUTO stack used identically in simulation and real flights.
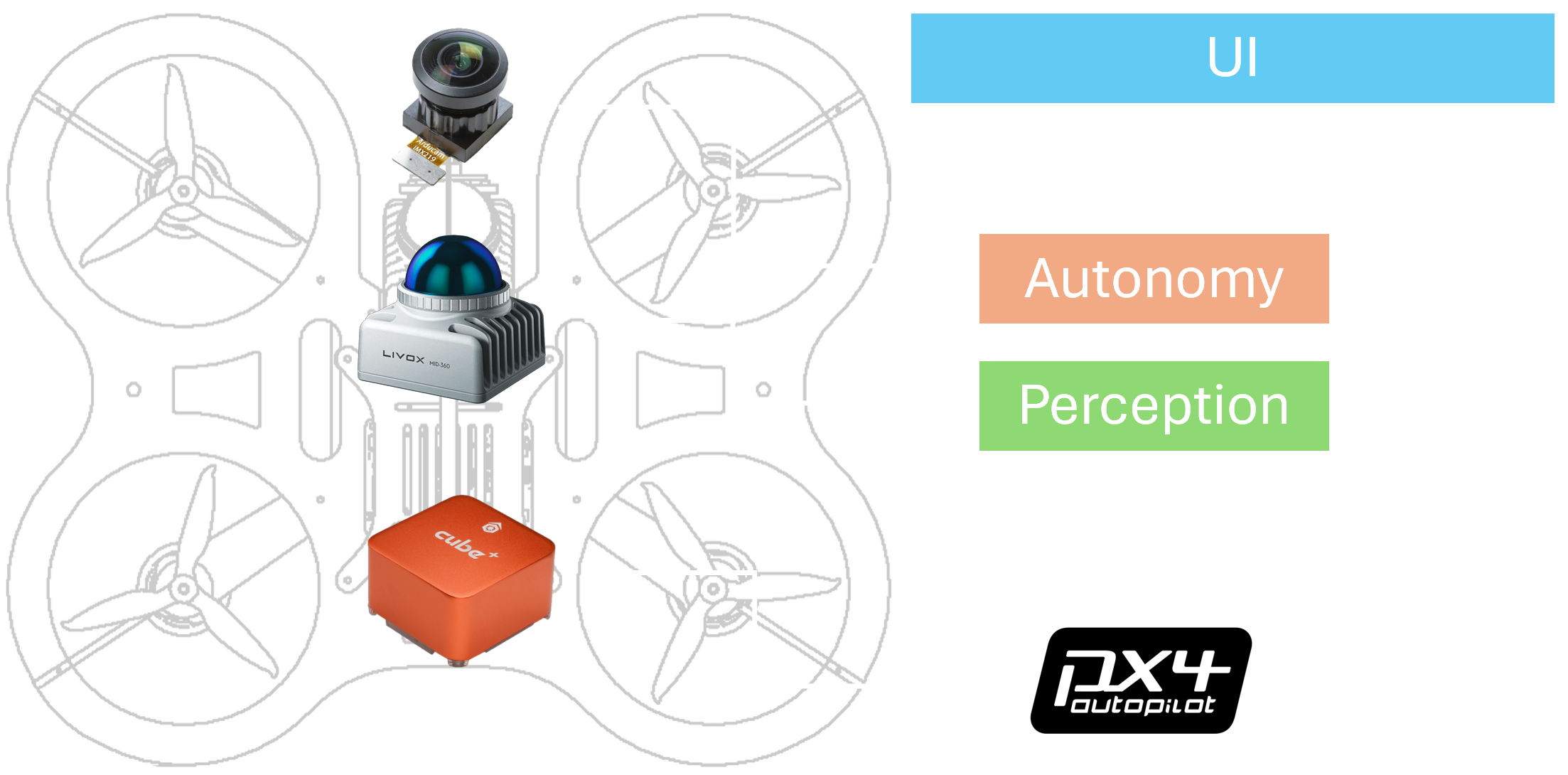
Perception
- LiDAR-inertial state estimation and mapping for GPS-denied indoor operation.
- Dynamic obstacle handling and occupancy map generation for planning.
- Designed for robust indoor inspection with onboard sensing.
Read: Perception
Planning & Control
- Local planner for dynamically feasible trajectories in clutter.
- On-manifold MPC tracking with PX4 setpoint streaming.
- Supports teleop, goal, navigation, and exploration control modes.
Read: Planning & Control
Data‑Driven Autonomy
- Integration path for learned navigation policies with zero-shot transfer tests.
- Includes deployment notes and experimental examples.
Read: Learning-Based Planning & Control
Next steps
- If runtime is not ready yet, start with Real Docker Build
- To test in simulation first: Simulation Quick Guide
- For operator workflows: UI Quick Guide