Agipix Autonomy: Planning and Control
![]()
![]()
![]()
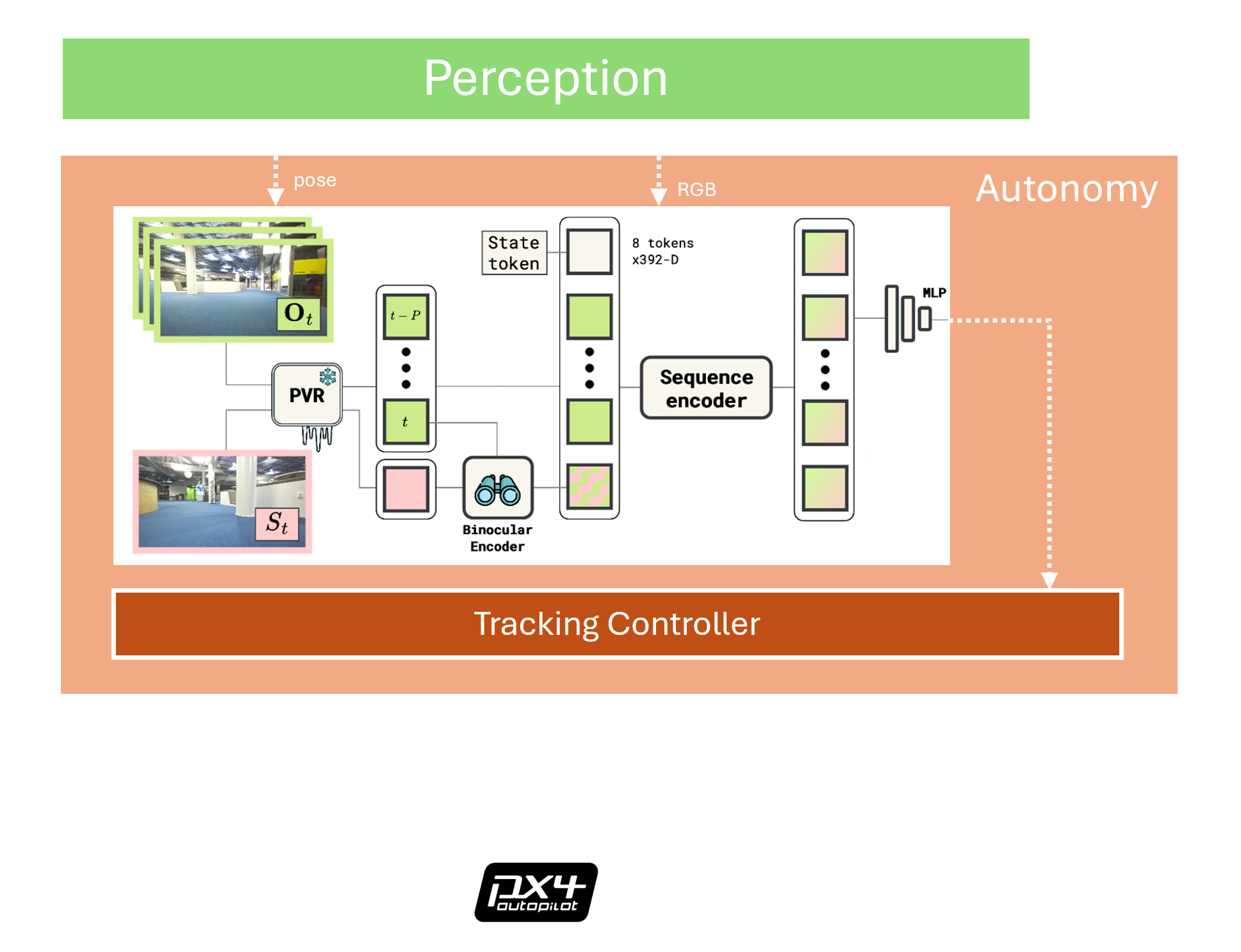
FAINT
The Robot Navigates to given subgoals using the end to end model. By leveraging pretrained visual representations, the proposed policy achieves up to 50% higher navigation success and generalizes across ground and aerial robots.
Agipix running FAINT - CoRL 25