Agipix: An Open Source Aerial Agile Autonomy from Sim-to-Real
October 1, 2025 · Projects: Robotic, RAICAM
Agipix aims to present an open source aerial robotics platform that has a digital twin and a full stack modular autonomy with heuristic a...
I am a Doctoral Researcher and a MSCA fellow at the Computer Vision Group based at the University of Tampere, Finland.
My Expertise is in Visual Inertial odometry , I design and prototype Agile Aerial robots, Aerial manipulators, digital twins of above,
and learning based methods.
I am an advocate of using robust agile robotics and edge computing to solve problems
in the transportation, energy, safety and security sectors. Feel free to connect and chat
if something interesting comes your way!
October 1, 2025 · Projects: Robotic, RAICAM
Agipix aims to present an open source aerial robotics platform that has a digital twin and a full stack modular autonomy with heuristic a...
September 15, 2025 · Projects: Robotic, RAICAM
We propose a learning-based inertial odometry algorithm that integrates the full quadrotor dynamics, including body-frame torques, as mod...
August 30, 2025 · Projects: Robotic
Simulator-trained visual navigation policies can outperform real-world-trained ones by up to 50%, enabled by pretrained visual features t...
July 4, 2025 · Projects: Robotic, RAICAM
Low-Cost Rapid-Development Air-Ground Robotic Solution for Nuclear Power Plant Inspection

May 22, 2025 · Projects: Robotic
Co-developed a data driven model capable of in-the-wild navigation for mobile robots. The method is put to test at the ICRA 2025.
November 21, 2024 · Projects: Robotic, RAICAM
Co-developed a data driven model capable of in-the-wild navigation for mobile robots. The method is put to test at the ICRA 2025.
January 30, 2024 · Projects: Robotic, ARRF
Developed a real-time semantic-aided Visual–Inertial Odometry (VIO) system for autonomous robots in dynamic indoor environments. Designed...

September 2, 2023 · Projects: Robotic, ARRF, Events
Entry to KUAM 2023 focused on autonomous last-mile delivery to apartment verandahs using a lightweight UAV platform. Key innovations incl...
![Solar Water Heating System Using Fresnel Lens with 6-DOF Tracking [Patent 10-2023-0027486] cover](/assets/media/2023/08/xarm_cover.gif)
August 30, 2023 · Projects: Robotic, ARRF
This project demonstrates an integrated solar water-heating prototype that combines a PMMA Fresnel lens with a 6-DOF robotic manipulator ...
May 30, 2023 · Projects: Robotic, ARRF
Developed a failure-aware visual–inertial navigation system that fuses multiple tracking cameras using an Interacting Multiple-Model (IMM...

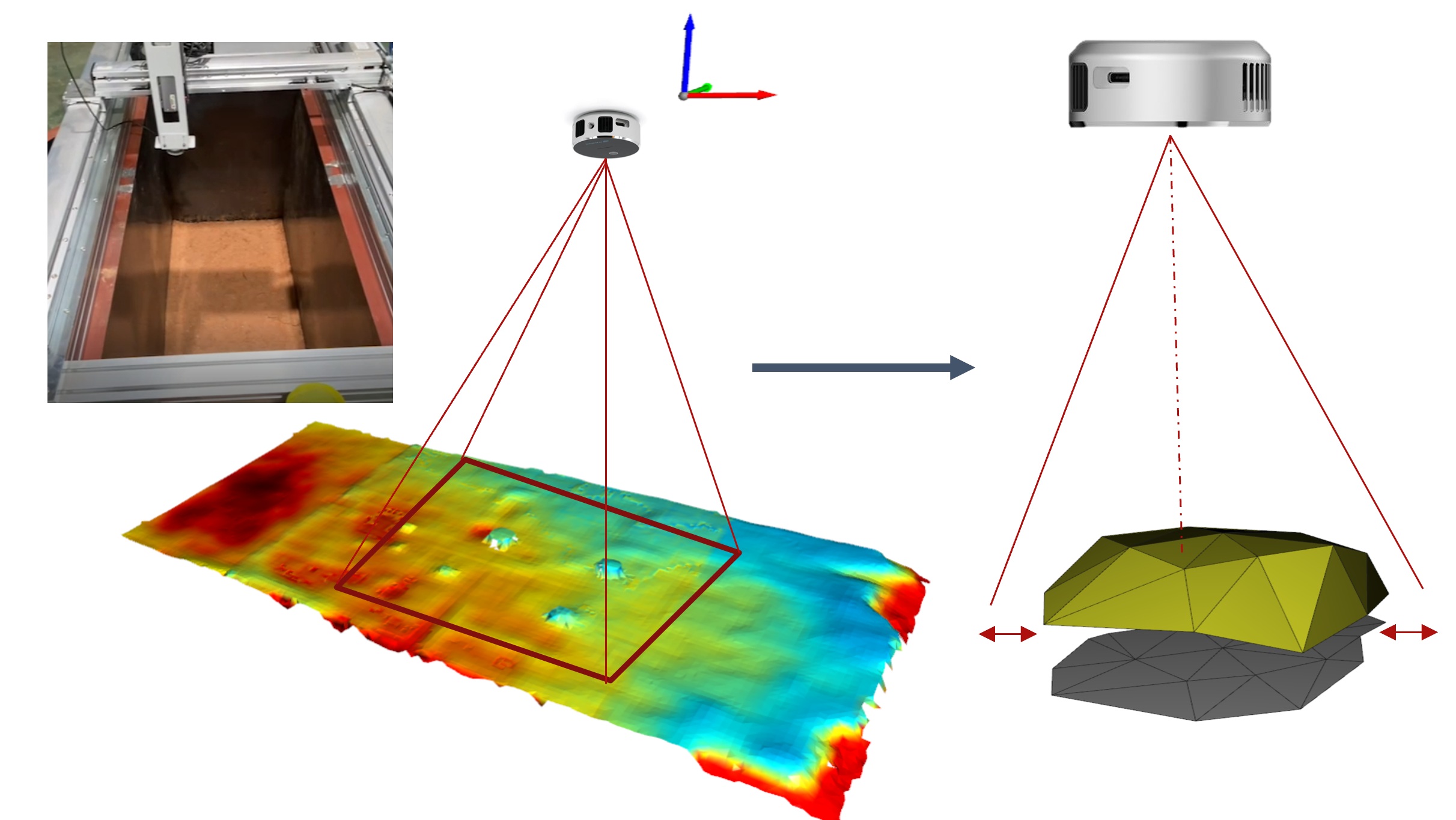
April 30, 2023 · Projects: Robotic, ARRF
Development of an automated aerial inspection system for reinforced concrete components using drones equipped with depth sensors and mach...

December 11, 2022 · Events, Projects: Robotic, ARRF
This competition is conducted by the Korean water resources agency (K-Water) and the ETRI research institute. The event consisted of 3 ma...

December 11, 2022 · Projects: Robotic, ARRF, Events
Famously known as Korea's most prestigious UAV contest, the '20th Korea Robot Aircraft Contest KUAM 2022 was held on the 20th of Septembe...
November 30, 2022 · Projects: Robotic
This project presents a synchronized visual-inertial sensor system using the Jetson Orin platform for accurate real-time SLAM.
August 30, 2022 · Projects: Robotic, ARRF
This project addresses the construction industry's shift toward automation by introducing a computer vision-based method for detecting a...
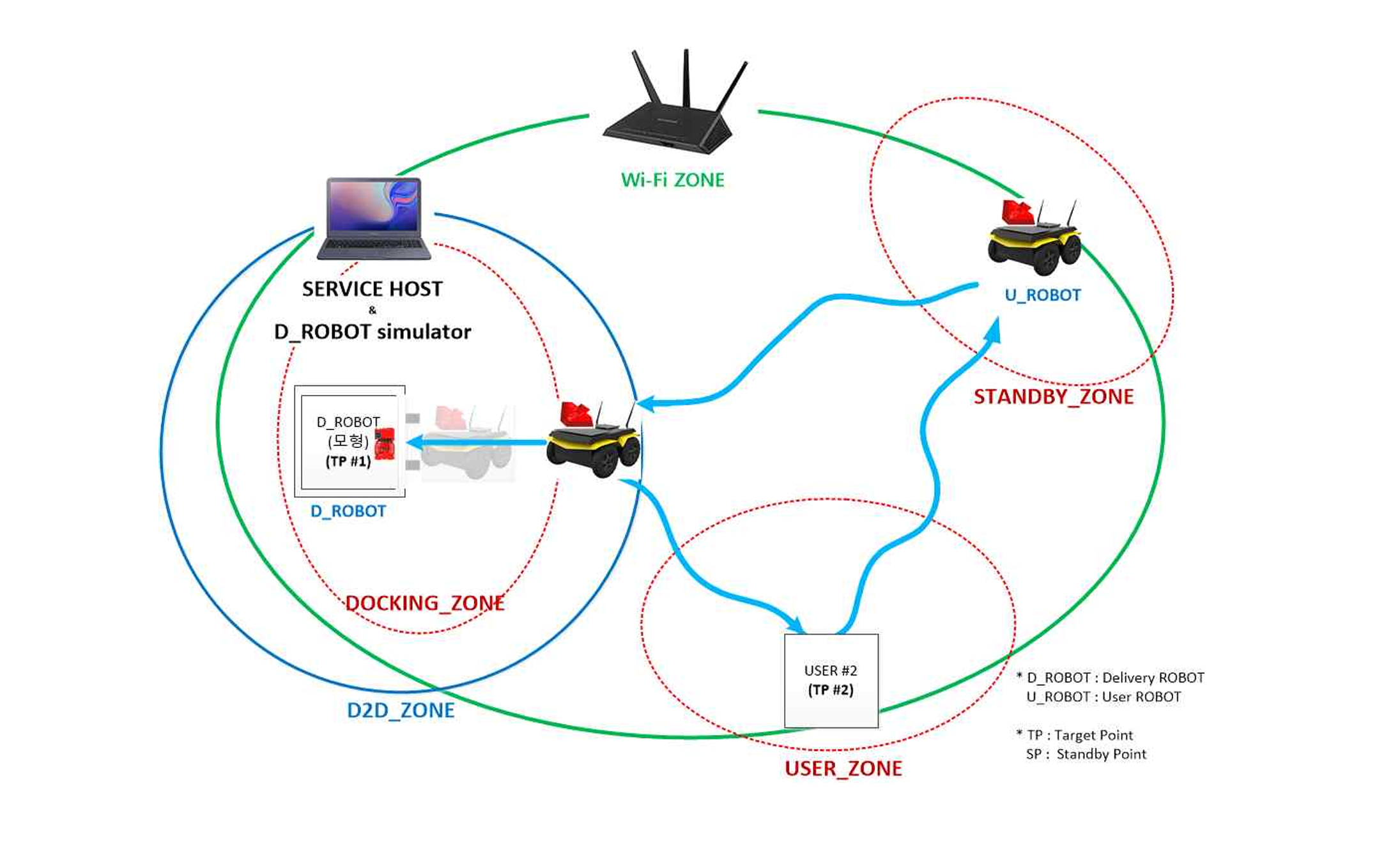
November 30, 2021 · Projects: Robotic, ARRF
This project focused on developing a docking platform for unmanned robots using BLE 5.1 wireless communication and SLAM-based navigation....

January 17, 2019 · Projects: Robotic
In my final year of undergraduate research, the aim was to Design and develop an unmanned manipulator to execute an operation which is un...

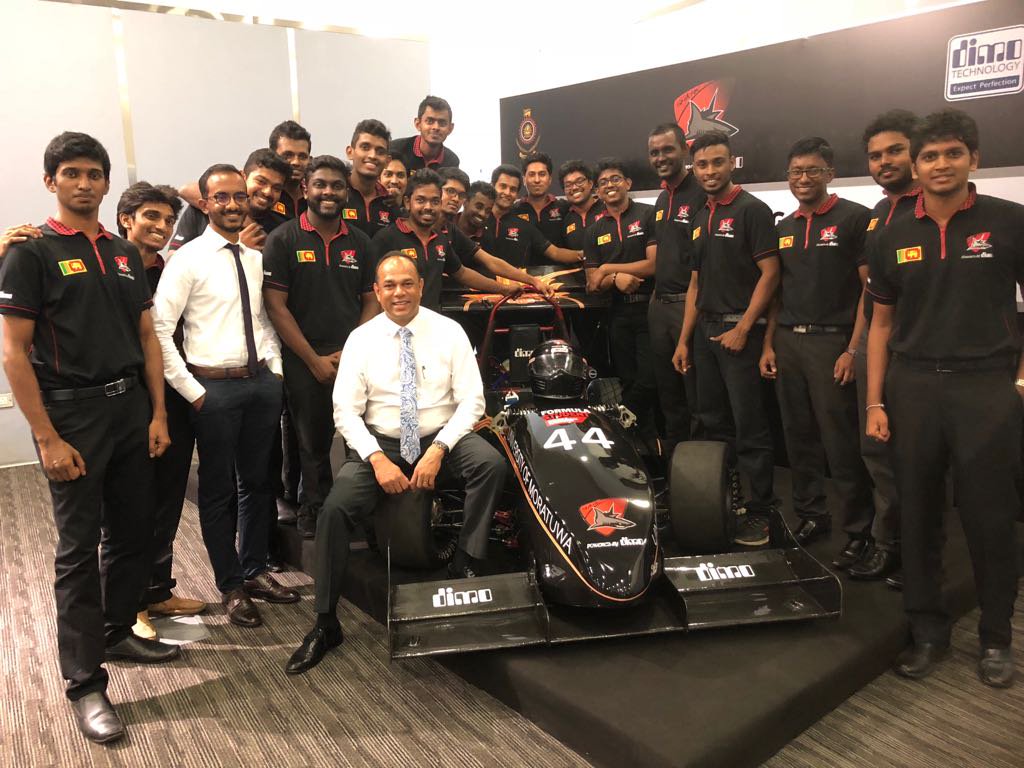
June 29, 2018 · Events, TeamSHARK
DI - Mora P2, Formula student car developed by Team SHARK officially unveiled at the University of Moratuwa on 29th of June 2018. Event w...

June 26, 2018 · Projects: Electronic, Projects: Other, TeamSHARK
Formula Student (FS) is Europe’s most established educational motor-sport competition, run by the Institution of Mechanical Engineers (IM...
June 26, 2018 · Events, TeamSHARK
With the Highest level of technicality, expertise and the love for what they do, Team SHARK proudly unveiled the astounding Beast, DI-MOR...
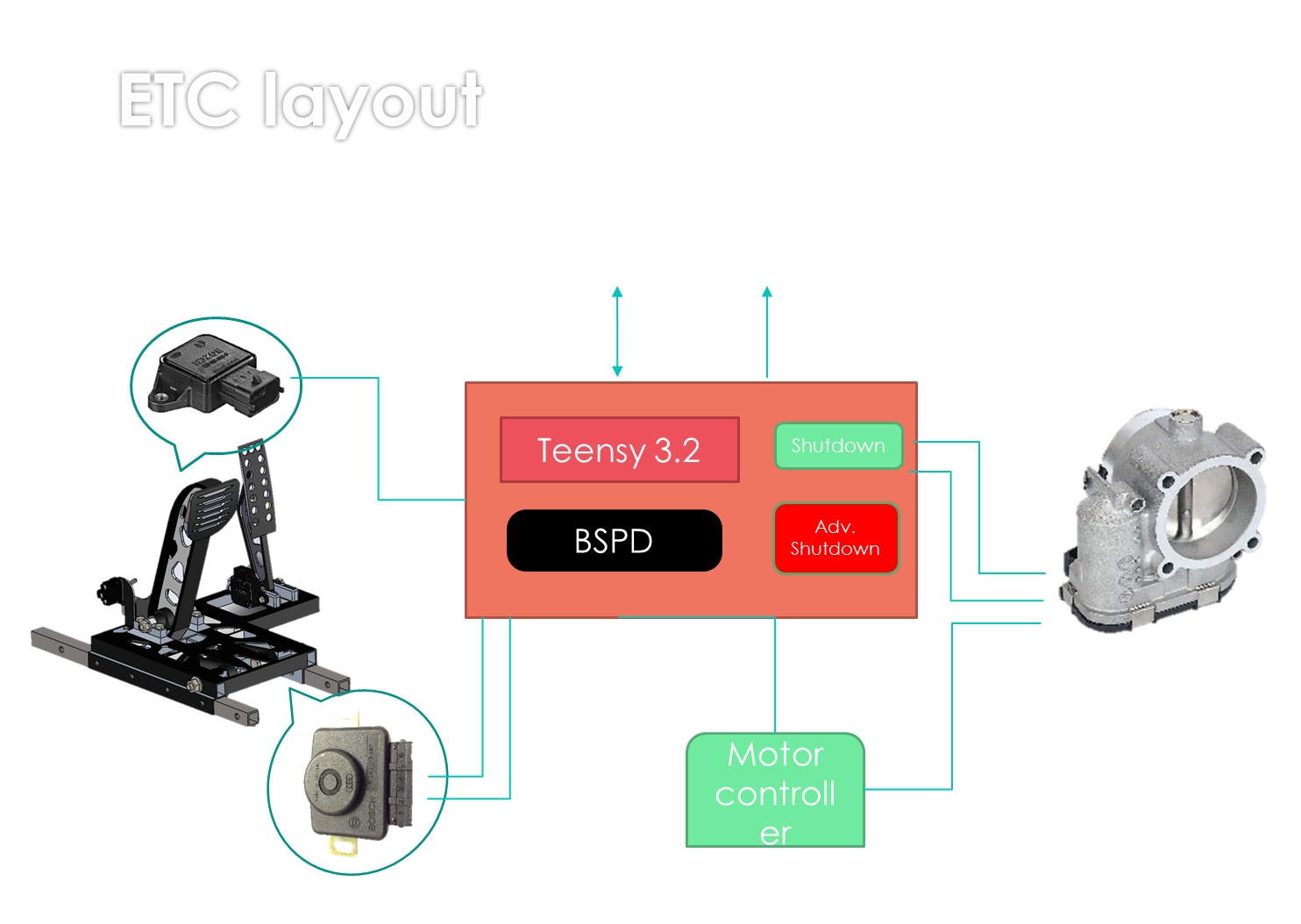
May 17, 2018 · Projects: Electronic, TeamSHARK
Clutch less shifting electronic throttle requires to provide fine throttle cuts and blips. After considering a custom throttle body desig...
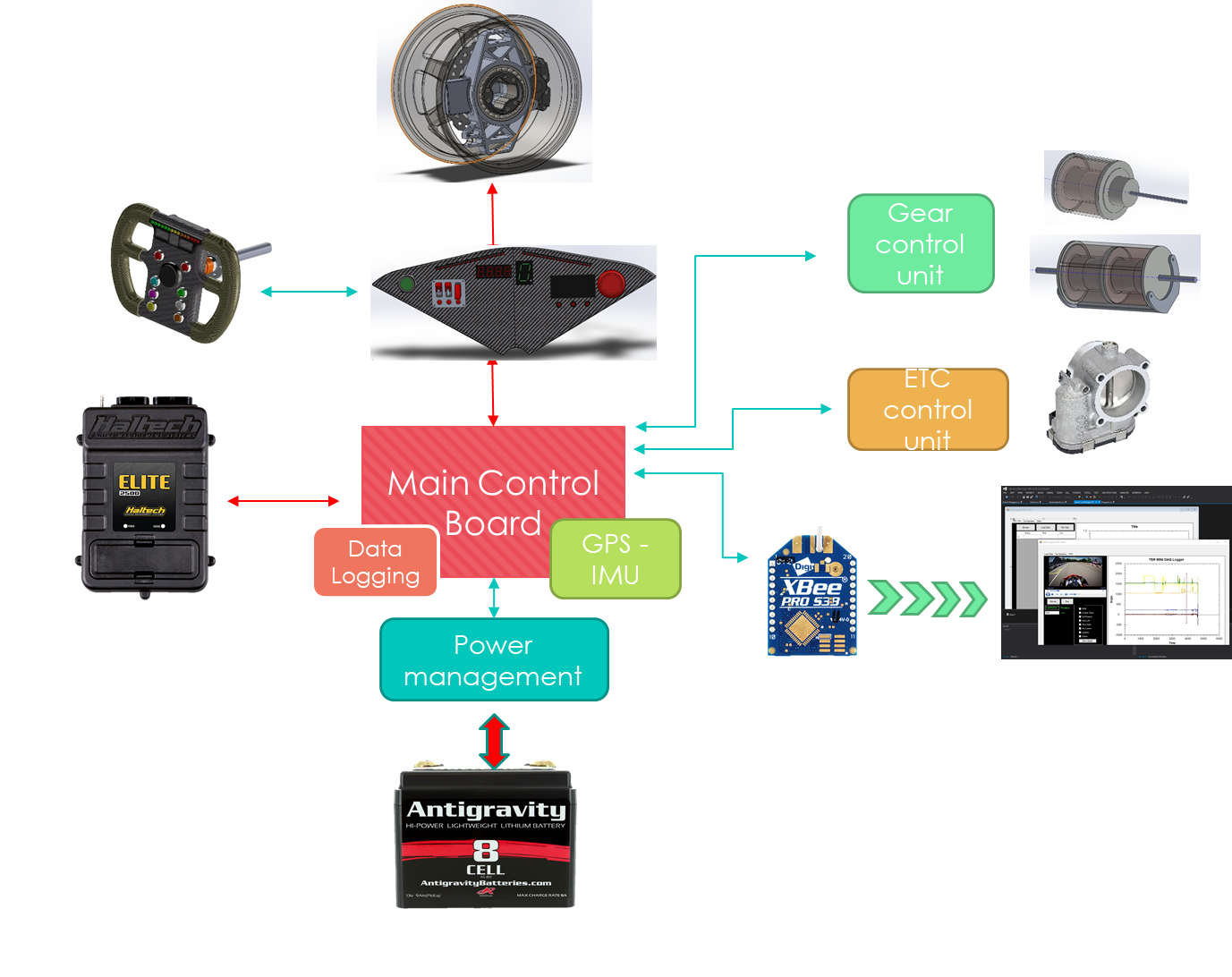
May 17, 2018 · Projects: Electronic, Projects: Other, TeamSHARK
Lack of a custom electrical system and a Data acquisition system in the previous iterations of TSR cars made the designing team lean on r...
April 20, 2018 · Projects: Electronic, TeamSHARK
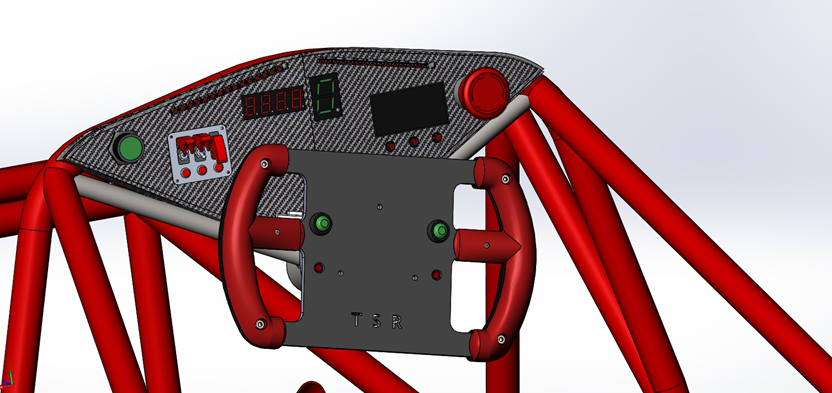
OEM race pack dashboards are not designed for open wheel racing. So it’s heavy, the display is not visible in the daylight and drivers st...
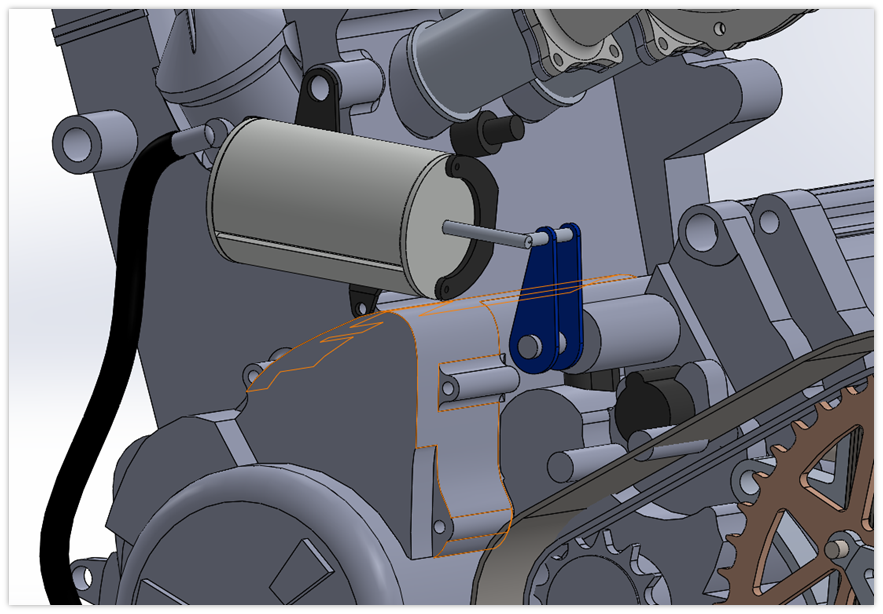
March 23, 2018 · Projects: Electronic, Projects: Other, TeamSHARK
The Engine of the DI-MORA P2 (Yamaha MT07) has a sequential gear box.

February 10, 2018 · Events, TeamSHARK
Team SHARK Racing with DIMO offered it's fans a chance to wind a exclusive karting session with the team by sending sketch designs of TSR...

November 22, 2017 · Events, TeamSHARK
Opening a new chapter in Sri Lankan engineering history, president of Institute of Mechanical Engineers (IMechE), Mrs. Carolyn Griffiths ...

October 27, 2017 · Projects: Other, Projects: Robotic
This Arduino based Line follower robot is developed to compete at the Sri Lankan Robotics Challenge 2017 competition held at University o...

October 16, 2017 · Events, Projects: Electronic, TeamSHARK
Team SHARK Racing from University of Moratuwa showcased their pride and joy in the form of two amazing Formula Student Racing cars at the...
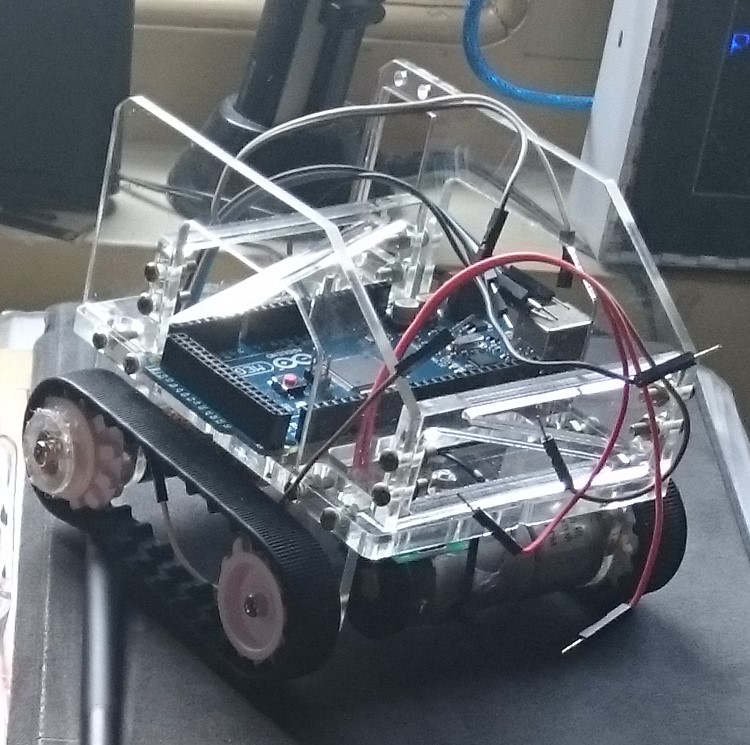
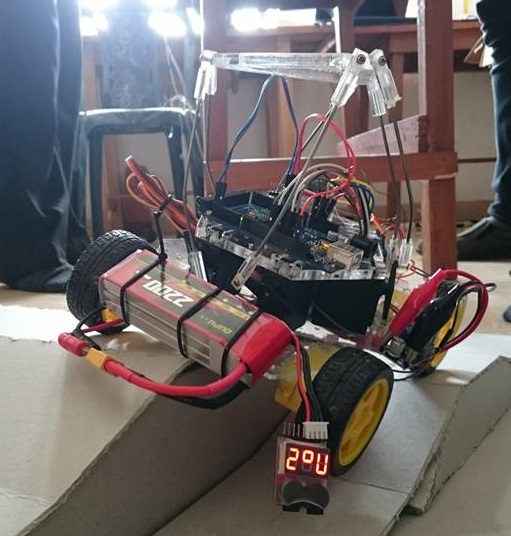
November 14, 2016 · Projects: Other, Projects: Robotic
This is a Arduino based tracked robot designed to be as compact as possible. Fully perspex chassis makes it easy to assemble and Rugged.

October 14, 2016 · Events, Projects: Robotic
This prosthetic arm is designed for a amputee who lost the arm above elbow joint (Ulna).
September 16, 2016 · Projects: Electronic, Projects: Other
This build is a unique personalized gift that’s cool and reflects the character of the recipient.
July 6, 2016 · Projects: Robotic
This 6 DOF mobile Stewart platform was developed as a course requirement of Semester 3 Mechatronics module. It has the capability to bala...
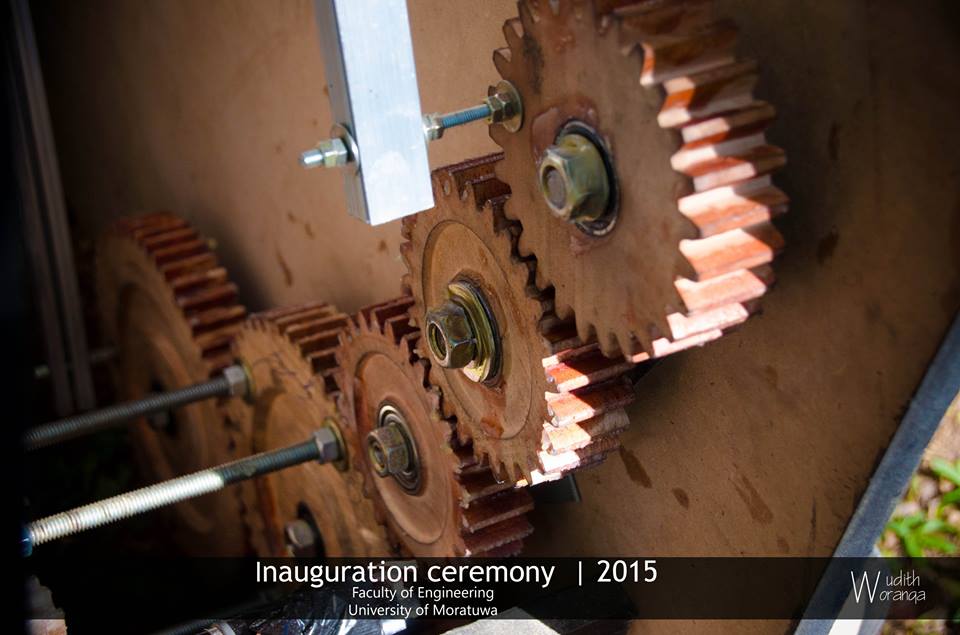
November 25, 2015 · Events, Projects: Other
This is an animated mechanical real size human figure designed based on a gear mechanism. This was a Exhibit at the 2015 inauguration cer...

November 13, 2015 · Events, Projects: Robotic
The EMG controlled feeder project won the Best Undergraduate project award at the TECHNO 2015 exhibition which was held form 9th to 11th ...

June 14, 2015 · Projects: Other
This bench power supply is made using an old PC ATX switching type power supply. 4 separate levels of voltages can be obtained.
Oh hello. Want to get in touch for some chit-chat over coffee? (coffee optional)
Send me a message on Twitter, GitHub, or LinkedIn (icons on your left). Thanks for visiting!