
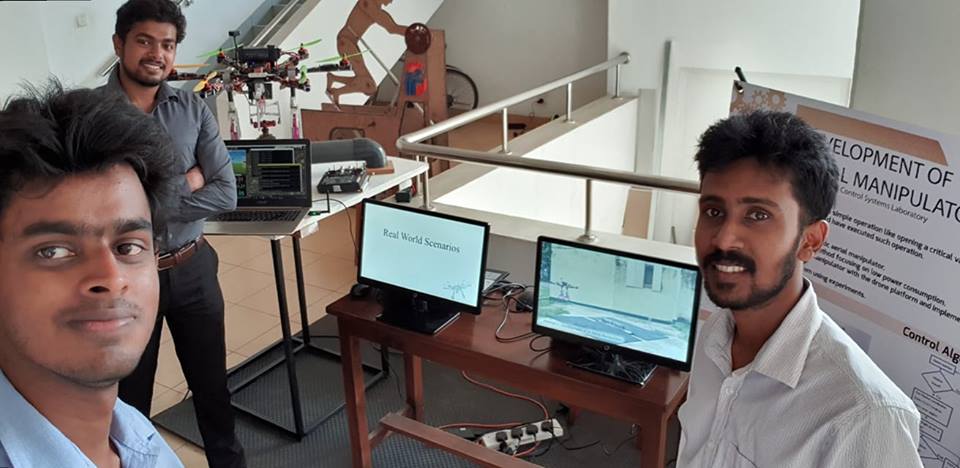
In my final year of undergraduate research, the aim was to Design and develop an unmanned manipulator to execute an operation which is unreachable to humans due to a hazardous environment in an emergency situation.
Under the supervision of Dr Thilina Lalitharathne we developed an Aerial manipulator which can detect a critical valve and operate using computer vision.

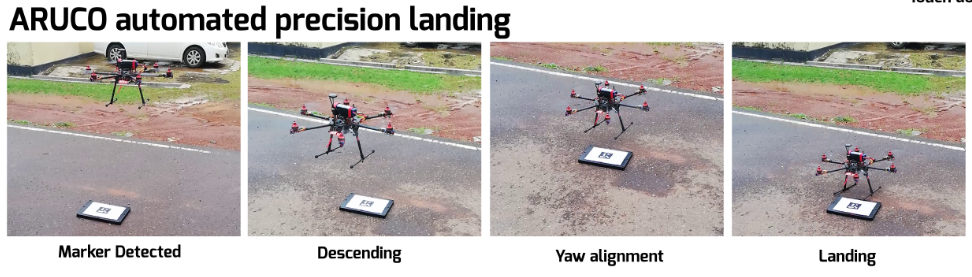
Control of the drone is done with the aid of trajectory tracking using ApriTag visual markers running ROS in a Linux companion PC.
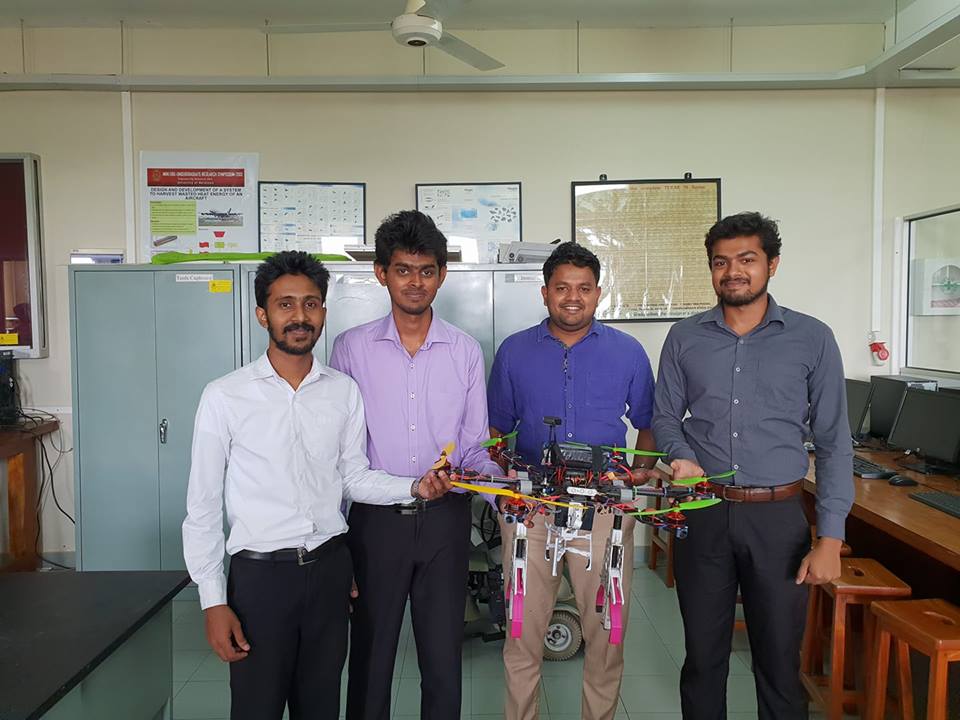
The drone features a novel design of a passive gripper to attach to the pipe which also works as a landing gear.
The system was tested successfully and awarded with 3 A+s during the evaluation program.
Gallery

I was awarded the Institution Project Award - 2019 by IMechE and the Mobil award 2019 recognizing this project.
Awards
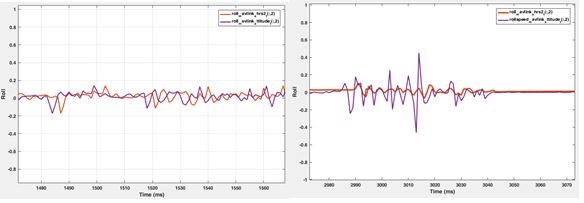
Takeoff attempt
Landing attempt