#BLE #SLAM #Robotics #ROS #Lidar #Navigation #Docking
One of the biggest challenges in deploying unmanned ground robots is ensuring they can operate continuously without constant human oversight. This means not only navigating complex environments but also autonomously returning to a docking station to recharge. My project addressed this problem by developing a wireless communication–based docking platform using Bluetooth Low Energy (BLE) 5.1.

The Problem
Traditional docking solutions often rely on vision or physical markers, which can be unreliable in dynamic environments. A robust docking platform must handle:
- Autonomous navigation in unknown spaces
- Reliable docking under variable conditions
- Continuous operation without external assistance
The Approach
The system was designed around three core components:


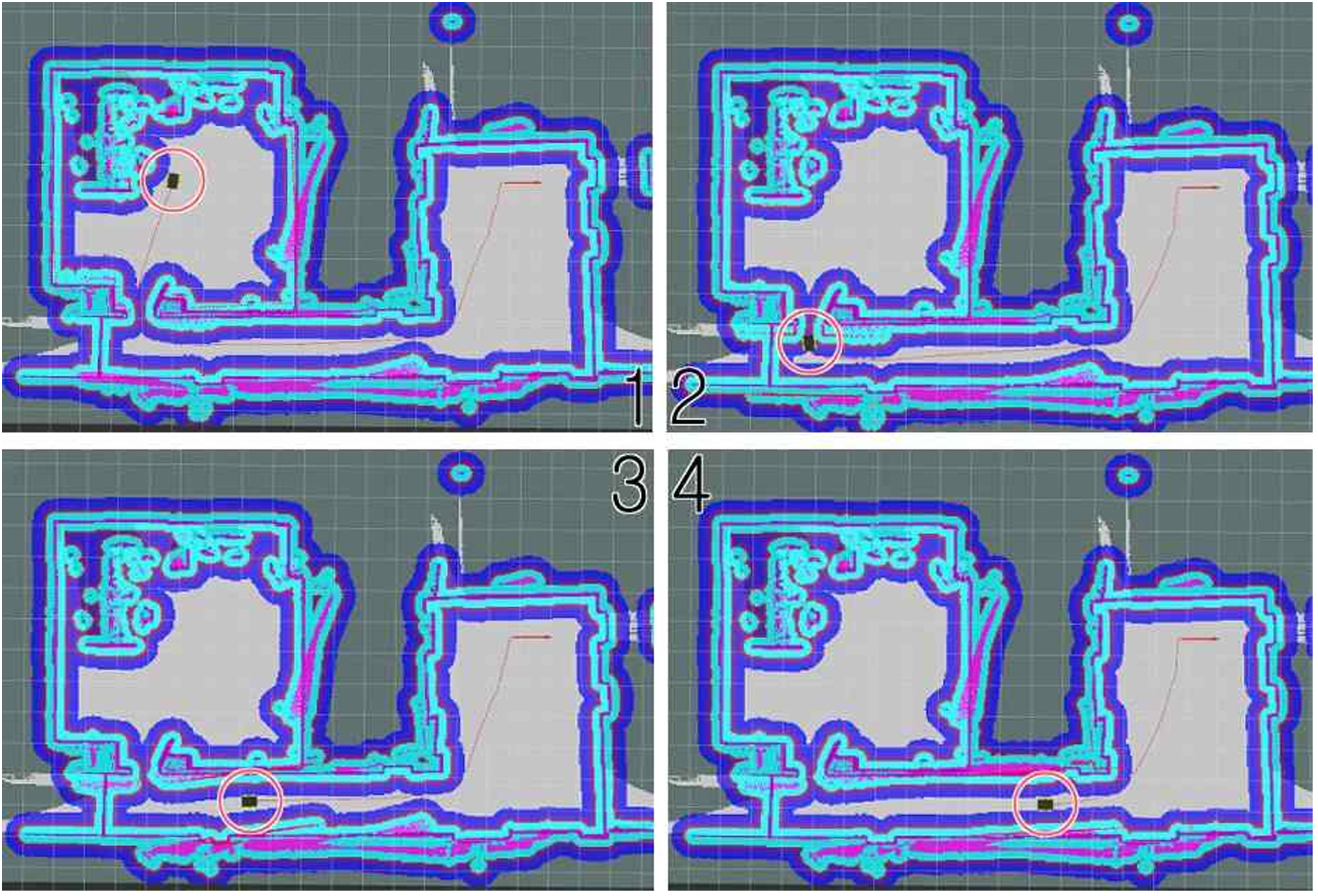
1. SLAM & Navigation
- Implemented lidar-based SLAM with Cartographer, fusing pre-maps and real-time laser scan data.
- Combined A* (global path planning) with Dynamic Window Approach (DWA) (local obstacle avoidance).
- Enabled the robot to safely move across rooms, hallways, and docking zones.
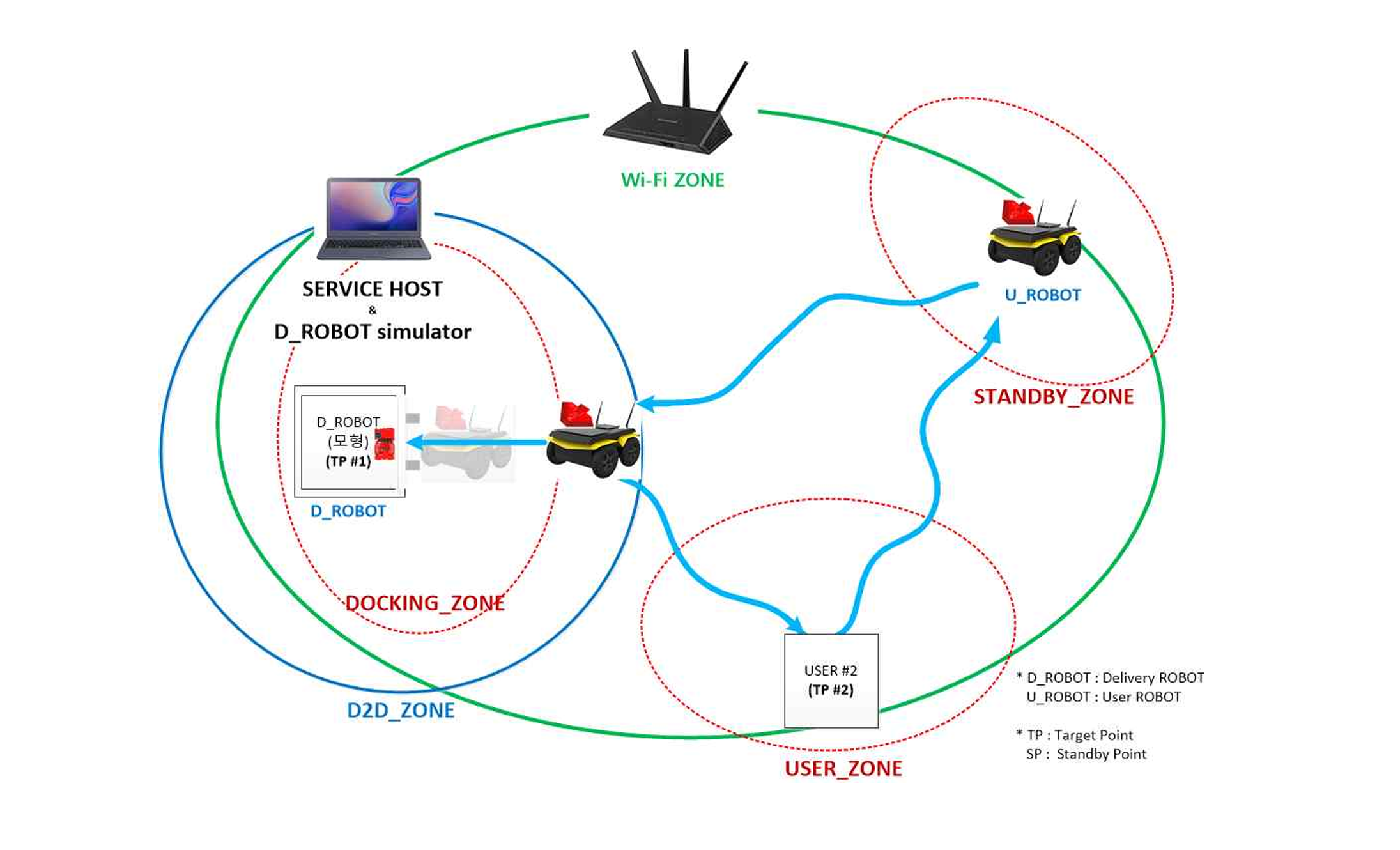
2. Motion Control & Docking Zone Detection
- A BLE transmitter (Tx) was mounted on the robot, while a receiver (Rx) was placed in the docking station.
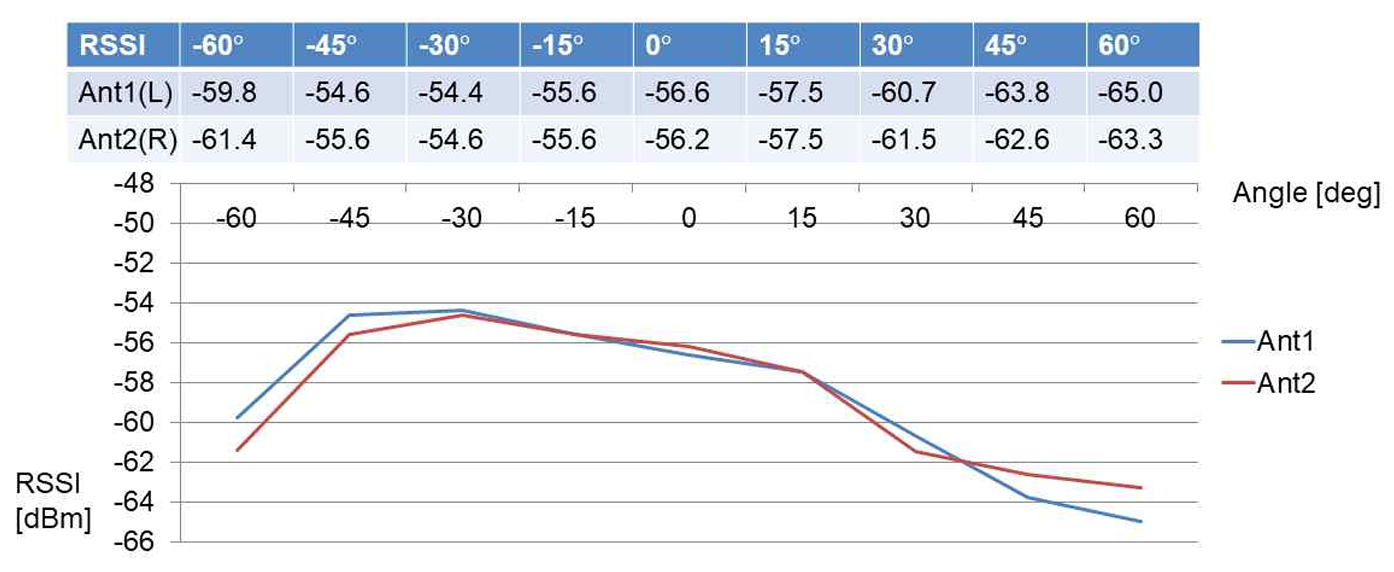
- The system measured Angle of Arrival (AoA) and Received Signal Strength Indicator (RSSI) values to guide the robot.
- Docking was triggered when RSSI fell within a defined threshold, ensuring the robot transitioned smoothly into docking mode.

3. Docking Protocol & Experimental Validation
- Developed a BLE 5.1–based docking protocol with ROS integration.
- Verified docking accuracy through real experiments, achieving final alignment within ±10 cm lateral error and heading precision of −5° to +5°.
- Evaluated older and newer BLE boards (TI CC2640 vs. CC26X2) and optimized for reliable AoA tracking without interference.
Key Results
- Autonomous navigation with robust obstacle avoidance.
- Wireless docking protocol that leveraged BLE 5.1 for environmental robustness.
- Reliable recharging—robot could detect low battery, navigate home, dock, and resume operation.
- Experimental validation showed consistent performance despite signal variability.
Conclusion
This project demonstrated how wireless communication and SLAM-based navigation can enable reliable autonomous docking for unmanned robots. By integrating BLE 5.1 communication with motion control and docking protocols, the platform ensured accurate docking and continuous operation without human intervention.
This solution is scalable to applications in facility robots, delivery systems, and industrial automation, where autonomy and uptime are critical.