#Aerial Robotics #Ground Robotics #Autonomous Systems #Industrial Inspection #Multi-Robot Systems #ROS 2 #SLAM #Computer Vision #Nuclear Inspection #EnRicH
Building a Low-Cost Air-Ground Robotic System for Nuclear Plant Inspection

In June 2025, our team participated in the EnRicH 2025 Robotics Hackathon held at the decommissioned Zwentendorf Nuclear Power Plant in Austria — one of the most unique and challenging testbeds for field robotics. The goal: to design a robotic system capable of mapping, radiation detection, and inspection inside an environment where GPS is unavailable, communication is unreliable, and radiation levels can be hazardous for humans.
From Idea to Field-Ready Robot in 3 Weeks
Nuclear Power Plant Test Zone ☢️ - Multi-Domain System in Endurance Test | EnRich 2025#Hackathon
We had just three weeks to design, build, and deploy a heterogeneous robotic system combining a drone and a ground vehicle. Using off-the-shelf parts, 3D-printed components, and open-source frameworks like ROS2 and PX4, we created: - A quadrotor equipped with LiDAR, IMU, and a Geiger counter for aerial radiation mapping. - An Ackermann-steering ground robot (UGV) for 3D mapping and navigation in tight corridors.
Both platforms shared the same onboard computer — an NVIDIA Orin NX — running ROS2 for perception, SLAM, and navigation. This unified design allowed faster integration, debugging, and modular scalability.
Navigating Inside a Nuclear Plant


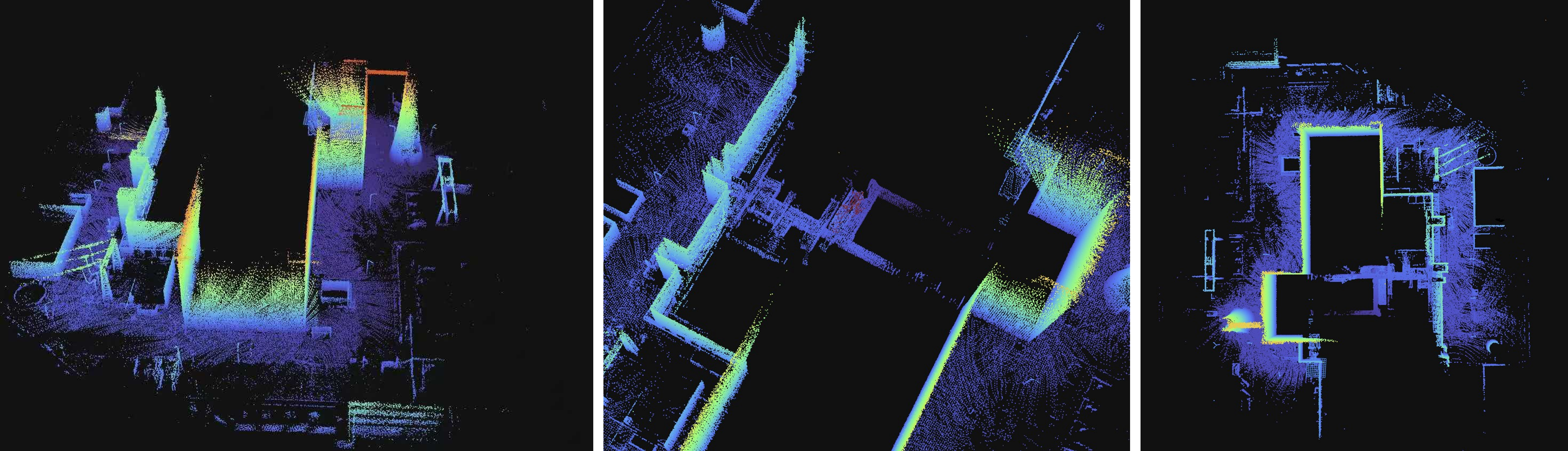
Operating inside thick concrete walls meant no GPS and poor communication. We tackled this by deploying a mesh Wi-Fi network with repeaters and dynamic reconnection routines. Our robots relied on LiDAR-inertial odometry (DLIO) and LIO-SAM for robust mapping, even in visually and magnetically challenging conditions.
The UGV performed autonomous exploration using frontier-based mapping, while the UAV executed trajectory-based flight planning with RRT* and minimum-snap trajectory generation — ensuring smooth, collision-free navigation even with limited range and time.
Field Trials and Lessons Learned
During live trials, both robots successfully completed mapping and radiation detection tasks inside the NPP. However, we encountered real-world surprises — including sudden network interference when another team powered up a large communication station, which temporarily froze our drone mid-task. These experiences reinforced critical lessons in redundant communication, autonomy fallback, and energy-aware planning for time-critical missions.Open Science and Future Work
All our mechanical designs, schematics, and ROS2 packages are open-sourced, supporting other researchers and practitioners who want to build adaptable robotic solutions for nuclear or hazardous environments. This project demonstrated that high-impact field robotics doesn’t require high budgets — just the right mix of collaboration, open-source tools, and creativity under pressure.
Publication
This project is accepted to be presented at the IEEE Symposium on Safety, Security, and Rescue Robotics (SSRR). Citation will be available soon.