Overview
The Jetson CV Hub is a versatile, reconfigurable computer vision platform designed for robotics and machine vision research. It integrates:
🎥 FLIR Machine Vision Cameras
High-quality imaging with hardware synchronization
📡 Xsense IMU
Precision inertial measurement for motion tracking and sensor fusion
🚁 PX4 Flight Controller
Master timing source (100 Hz), redundant IMU, and drone deployability
⚡ NVIDIA Jetson Orin
Powerful onboard computing with GPU acceleration
🔌 Onboard Power
Integrated power management for all components
🔧 Modular Design
3D printable housing with reconfigurable mounting options
Hardware Synchronization
The system features precise hardware synchronization with PX4 as the master device producing trigger signals at 100 Hz. The cameras and Xsense IMU are connected in parallel to receive synchronized timing signals, ensuring accurate temporal alignment for visual-inertial applications.
System Images
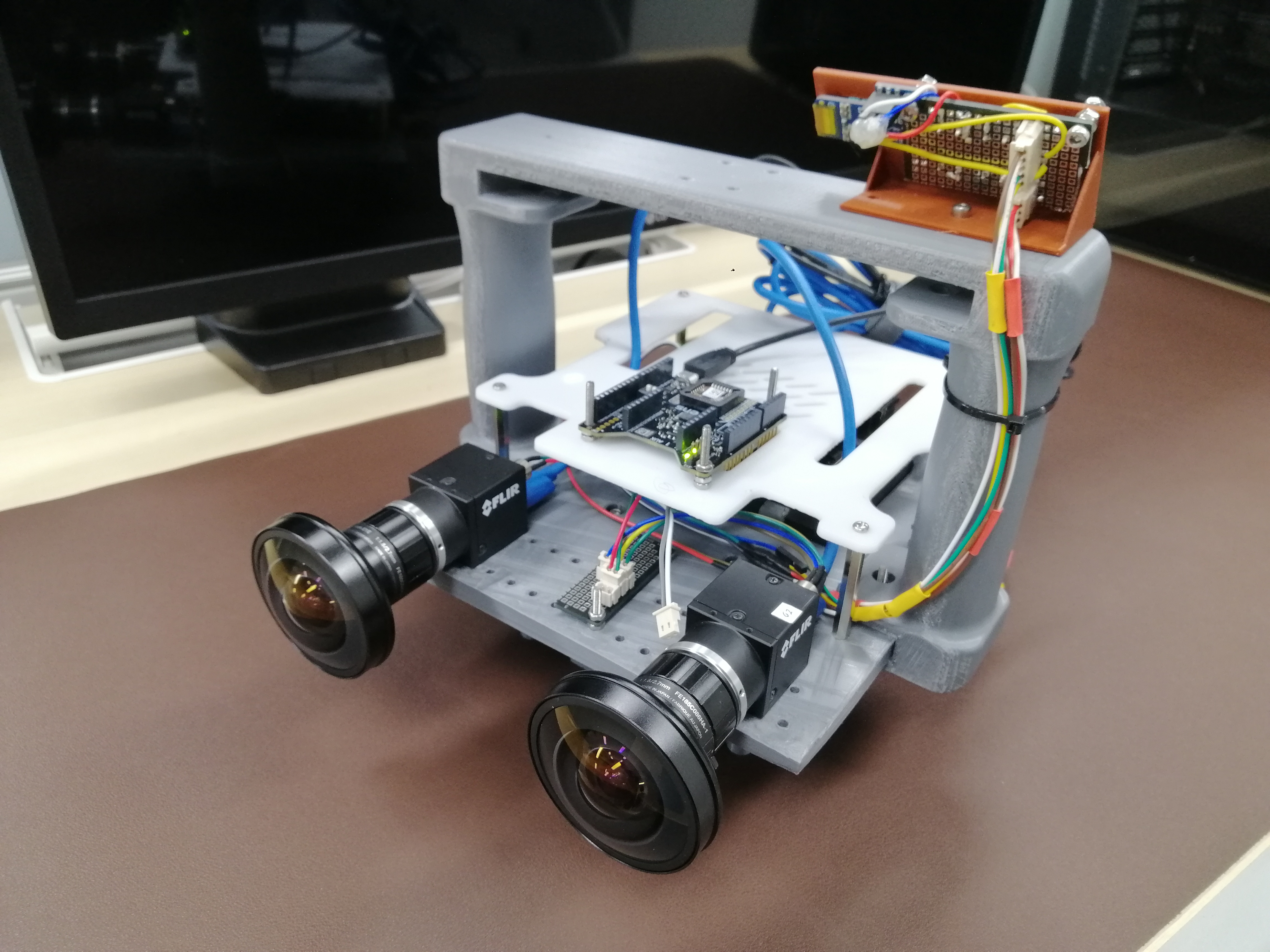
Front view with cameras

Back view with Jetson
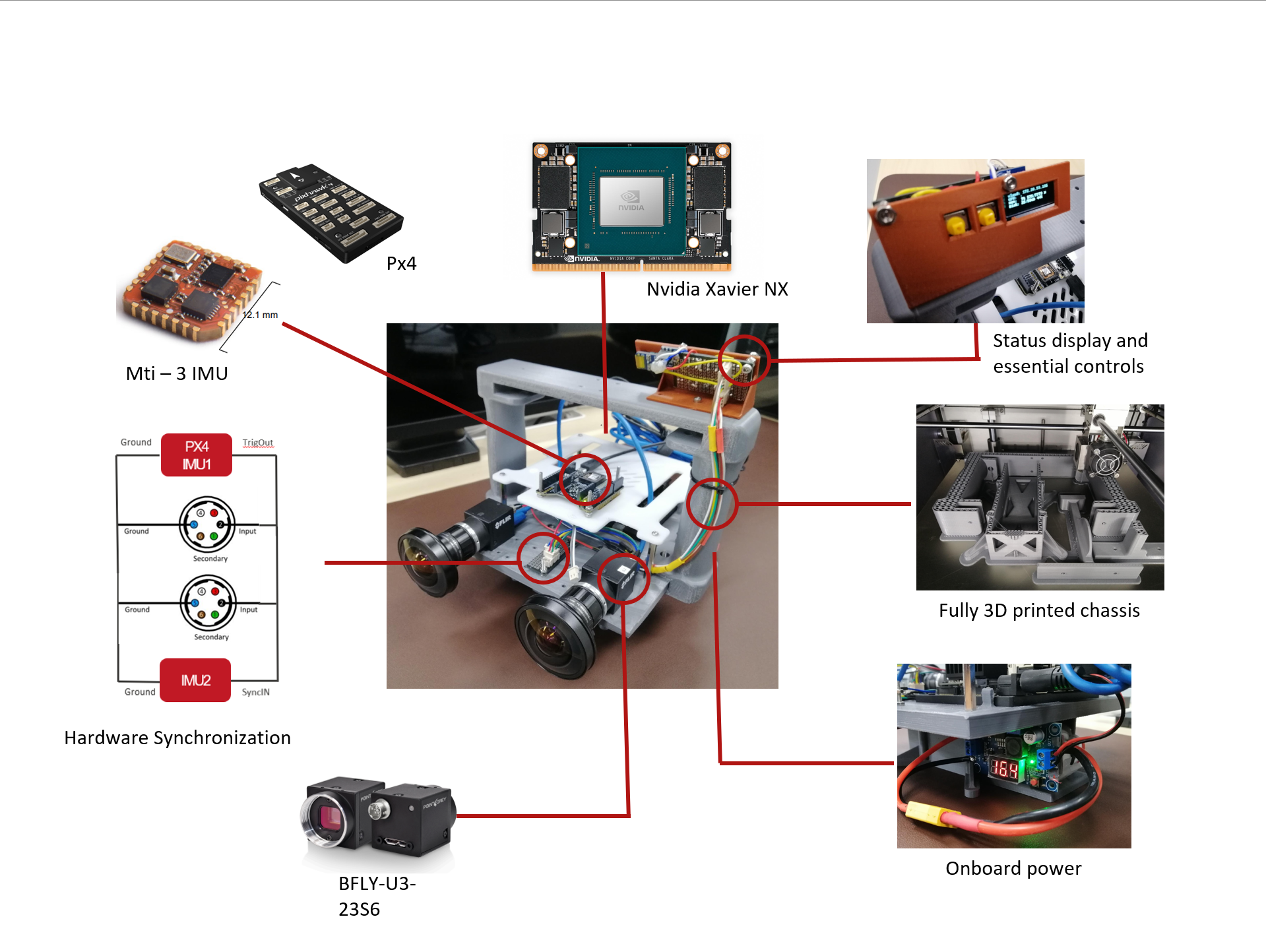
Annotated components
Project Video
Overview, features, and results demonstration
Features
- ✅ Open Source: All CAD files, documentation, and assembly instructions freely available
- ✅ 3D Printable: Design optimized for standard FDM 3D printers
- ✅ Modular: Support for 1-4 cameras with flexible mounting configurations
- ✅ Reconfigurable: Adapt the system for different applications and sensors
- ✅ Well-Documented: Comprehensive assembly, setup, and calibration guides
- ✅ Research-Ready: Calibration files and integration examples included
Getting Started
Review the Bill of Materials
Start by reviewing the Bill of Materials (BOM) to understand required components and parts.
Print the Parts
Follow the CAD instructions to download and prepare 3D printable components.
Calibrate the System
Follow calibration procedures to ensure accurate sensor measurements.
Use Cases
The Jetson CV Hub is designed for various research applications:
🤖 Mobile Robotics
Visual-inertial odometry and SLAM
🏭 Industrial Automation
Quality inspection and object detection
🚁 Drone/UAV Systems
Autonomous navigation and mapping
🔬 Research Projects
Computer vision algorithm development
📊 3D Reconstruction
Multi-camera stereo and structure-from-motion
🎯 Object Tracking
Real-time visual tracking with IMU fusion
Hardware Specifications
| Component | Description |
|---|---|
| Compute | NVIDIA Jetson Orin (NX/Nano/AGX) |
| Cameras | FLIR Machine Vision (1-4 units, model configurable) |
| IMU | Xsense MTi Series (6-DOF or 9-DOF) |
| Power | Integrated power distribution system |
| Housing | 3D printed PETG/PLA enclosure |
Connectivity
- USB 3.0 for camera interfaces
- GPIO/USB for IMU connection
- Gigabit Ethernet
- WiFi/Bluetooth (optional)
- External I/O ports for expansion
Software Stack
The system natively runs ROS2 Humble on NVIDIA Jetson with full GPU acceleration support.
Compatible with:
Community and Support
Contributing
We welcome contributions! Submit issues, improve documentation, or share your modifications.
Open an IssueGetting Help
Check the docs folder for detailed guides or use GitHub Discussions for general questions.
DiscussionsCitation
If you use this project in your research, please cite:
@misc{jetson-cv-hub,
title={A Synchronized Visual-Inertial Sensor System on Jetson for Accurate Real-Time SLAM},
author={[Kuruppu Arachchige, Sasanka]},
year={2024},
publisher={GitHub},
url={https://github.com/SasaKuruppuarachchi/jetson-cv-hub}
}Note: "Jetson CV Hub" is the short name of the project.